
Содержание
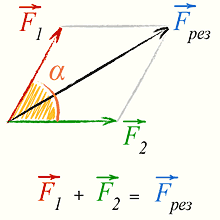
Если две силы приложены к одной точке, то их равнодействующая определяется правилом параллелограмма.
Диагональ параллелограмма, построенного на данных силах, определяет величину и направление равнодействующей.
Силы, приложенные к одной точке складываются геометрически.
Величину равнодействующей силы можно вычислить.
Если:
Fp — Величина равнодействующей силы,
F1 — Величина составляющей силы 1,
F2 — Величина составляющей силы 2,
α — угол, образуемый векторами составляющих сил F1 и F2,
То по теореме косинусов получим:
Если силы, приложенные к одной точке, взаимно перпендикулярны, то формула упрощается по теореме Пифагора
Сила выступает в качестве количественной меры взаимодействия тел. Это важная физическая величина, так как в инерциальной системе отсчета любое изменение скорости тела может происходить только при взаимодействии с другими телами. Иначе говоря, при действии на тело силы.
Взаимодействия тел могут иметь разную природу, например, существуют электрические, магнитные, гравитационные и другие взаимодействия. Но при исследовании механического движения тела природа сил, вызывающих у тела ускорение значения не имеет. Проблемой происхождения взаимодействия механика не занимается. Для любого взаимодействия численной мерой становится сила. Силы разной природы измеряют в одних единицах (в Международной системе единиц в ньютонах), при этом используют одни и те же эталоны. В виду такой универсальности механика занимается исследованием и описанием движения тел, которые испытывают воздействия сил любой природы.
Результатом действия силы на тело является ускорение тела (изменение скорости его движения) или (и) его деформация.
Сложение сил
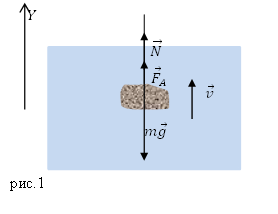
Сила — это векторная величина. Кроме модуля она имеет направление и точку приложения. Независимо от природы все силы складываются как векторы.
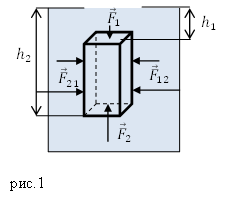
Пусть, металлический шарик удерживается упругой пружиной и его притягивает магнит(рис.1). Тогда на него действуют две силы: сила упругости со стороны пружины ($<overline
Этот опыт дает возможность сделать вывод о том, что несколько сил, действующих на одно тело можно заменить одной равнодействующей, при этом не важна природа сил. Равнодействующая получается как результат векторного суммирования сил, действующих на тело.
Определение и формула равнодействующей силы
И так, векторная сумма всех сил, оказывающих действие на тело в один и тот же момент времени, называют равнодействующей силой ($overline
Выражение (2) можно считать формулой равнодействующей силы.
Иногда равнодействующую силу обозначают $overline
Суммирование сил можно проводить графически. При этом используют правила многоугольника, параллелограмм и треугольника. Если при таком сложении сил многоугольник получился замкнутым, то равнодействующая равна нулю. При равенстве нулю равнодействующей систему называют уравновешенной.
Запись второго закона Ньютона с использованием равнодействующей силы
Второй закон Ньютона является основным законом в классической динамике. Он связывает силы, оказывающие воздействие на тело и его ускорение и позволяет решать основную задачу динамики. Если тело оказывается под воздействием нескольких сил, то второй закон Ньютона записываю так:
Формула (3) означает, что равнодействующая всех сил, приложенных к телу, может быть равна нулю, в том случае, если происходит взаимная компенсация сил. Тогда тело перемещается с постоянной скоростью или находится в состоянии покоя в инерциальной системе отсчета. Можно сказать обратное, если тело движется равномерно и прямолинейно в инерциальной системе отсчета, то на него не действуют силы или их равнодействующая равна нулю.
При решении задач и указании на схемах сил, действующих на тело, при движении тела с постоянным ускорением, равнодействующую силу направляют по ускорению и изображают длиннее, чем противоположно ей направленную силу (сумму сил). При равномерном движении (или если тело находится в состоянии покоя) длина векторов сил, имеющих противоположные направления одинакова (равнодействующая равна нулю).
Исследуя условия задачи, необходимо определить, какие силы оказывают действие на тело, будут учитываться в равнодействующей, какие силы не оказывают существенного влияния на движение тела и их можно отбросить. Значимые силы изображают на рисунке. Складывают силы по правилам сложения векторов.
Примеры задач с решением
Задание. Под каким углом должны быть расположены силы на рис. 2, чтобы их равнодействующая была равна по модулю каждой из составляющих ее сил?
Решение. Для решения задачи воспользуемся теоремой косинусов:
Так как по условию задачи:
то выражение (1.1) преобразуем к виду:$ $
Решением полученного тригонометрического уравнения являются углы:
[alpha =frac<2pi ><3>+pi n ;; alpha =frac<4pi ><3>+pi n left(где n-целое число
ight). ]
Исходя из рисунка (рис.2) нам подходит ответ $alpha =frac<2pi ><3>$.
Ответ. $alpha =frac<2pi ><3>$
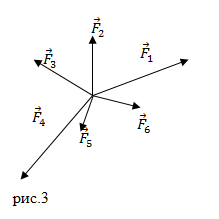
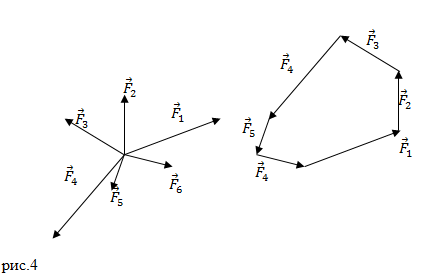
Задание. Чему равна равнодействующая сила, если на тело действуют силы, представленные на рис.3.
Решение. Равнодействующую силу найдем векторным суммирование используя правило многоугольника. Последовательно каждый следующий вектор силы отложим от конца предыдущего. В результате вектор равнодействующей всех сил будет иметь началом точку, из которой выходит первый вектор (у нас вектор $<overline
В результате построения получен замкнутый многоугольник, это означает, что равнодействующая сил, приложенных к телу равна нулю.
О причинах изменений
Классическая механика разделена на два раздела – кинематику, при помощи уравнений описывающую траекторию движения тел, и динамику, которая разбирается с причинами изменения положения объектов или самих объектов.
Причиной изменений выступает некоторая сила, которая есть мера действия на тело других тел или силовых полей (например, электромагнитное поле или гравитация). К примеру, сила упругости вызывает деформацию тела, сила тяжести – падение тел на Землю.
Сила – это векторная величина, то есть, ее действие – направленное. Модуль силы в общем случае пропорционален некоему коэффициенту (для деформации пружины – это ее жесткость), а также параметрам действия (масса, заряд).
Сложение сил
В случае, когда на тело действует n сил, говорят о равнодействующей силе, а формула второго закона Ньютона принимает вид:
$mvec a = sumlimits_^n vec F_i$.

Рис. 1. Равнодействующая сил.
Поскольку F – векторная величина, сумма сил называется геометрической (или векторной). Такое сложение выполняется по правилу треугольника или параллелограмма, либо по компонентам. Поясним каждый метод на примере. Для этого запишем формулу равнодействующей силы в общем виде:
$F = sumlimits_^n vec F_i$
А силу $F_i$ представим в виде:
Тогда суммой двух сил будет новый вектор $F_
Рис. 2. Покомпонентное сложение векторов.
Абсолютное значение равнодействующей можно рассчитать так:
Теперь дадим строгое определение: равнодействующая сила есть векторная сумма всех сил, оказывающих влияние на тело.
Разберем правила треугольника и параллелограмма. Графически это выглядит так:
Рис. 3. Правило треугольника и параллелограмма.
Внешне они кажутся различными, но когда доходит до вычислений, сводятся к нахождению третьей стороны треугольника (или, что тоже самое, диагонали параллелограмма) по теореме косинусов.
Если сил больше двух, иногда удобней пользоваться правилом многоугольника. По своей сути – это всё тот же треугольник, только повторенный на одном рисунке некоторое количество раз. В случае, если по итогу контур получился замкнутым, общее действие сил равно нулю и тело покоится.
Задачи
- На ящик, размещенный в центре декартовой прямоугольной системы координат, действуют две силы: $F_1 = (5, 0)$ и $F_2 = (3, 3)$. Рассчитать равнодействующую двумя методами: по правилу треугольника и при помощи покомпонентного сложения векторов.
Решение
Равнодействующей силой будет векторная сумма $F_1$ и $F_2$.
$vec F = vec F_1 + vec F_2 = (5+3, 0+3) = (8, 3)$
Абсолютное значение равнодействующей силы:
Теперь получим тоже значение при помощи правила треугольника. Для этого сначала найдем абсолютные значения $F_1$ и $F_2$, а также угол между ними.
Угол между ними – 45˚, так как первая сила параллельна оси Оx, а вторая делит первую координатную плоскость пополам, то есть является биссектрисой прямоугольного угла.
Теперь, разместив вектора по правилу треугольника, рассчитаем по теореме косинусов равнодействующую:
- На машину действуют три силы: $F_1 = (-5, 0)$, $F_2 = (-2, 0)$, $F_1 = (7,0)$. Какова их равнодействующая?
Решение
Достаточно сложить иксовые компоненты векторов:
Что мы узнали?
В ходе урока было введено понятие равнодействующей сил и рассмотрены различные методы ее расчета, а также введена запись второго закона Ньютона для общего случая, когда количество сил неограниченно.