
Содержание
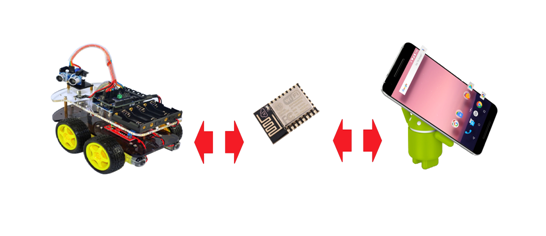
Предлагаю вам, уважаемые читатели GeekTimes, очередную статью из цикла по использованию микросхемы ESP8266 в качестве беспроводного моста для AVR микроконтроллеров, на примере аппаратной платформы Arduino Uno (Nano). В этот раз для полета на Луну управления платформой мы задействуем вместо компьютера устройство на базе «ANDROID». Ну, например, смартфон.
Подробности под катом:
Для нашей работы мы воспользуемся инструментарием, который был описан в предыдущей статье — беспроводным программатором BABUINO и модулем передачи кода и данных МPDE (module for programm and data exchange) прошиваемым в ESP8266.
Как выяснилось из откликов пользователей, сам программатор, в общем, пришелся ко двору и некоторые личности даже им успешно пользуются. Ну, в принципе, вещь действительно удобная; запустил приложение под виндой, выбрал hex файл из нужной папки и всё — через несколько секунд программка в нужном устройстве безо всяких проводов. Другое дело, что я зря с излишней горячностью нападал на пользователей софта ARDUINO, пишущих на Wiring C и пользующихся ARDUINO IDE с её скетчами и библиотеками. Безусловно, каждый делает как ему удобно — на ардуинском ли Wiring C или на С из AVR studio. Но в итоге, некоторые пользователи почему-то сразу решили, что программатор никак не совместим с ARDUINO софтом.
На самом деле, проблем с совместимостью, конечно же, никаких нет. Абсолютно также компилируете ваш скетч, где вам удобно до состояния hex файла и совершенно также просто отправляете его через беспроводной программатор на ваш Arduino UNO или NANO.
Обмен данными под софтом ARDUINO тоже никаких проблем не доставляет. Пишете волшебные строчки:
а дальше что-то типа:
receiveByte= Serial.read(); // чтение байта из буфера
Serial.write(receiveByte); // запись байта
И можете обмениваться байтовыми потоками по WI-FI совершенно спокойно. Ибо AVR микроконтроллер шлёт в ESP8266 и получает байты оттуда по последовательному порту UART, настроить работу с которым в Arduino может, как мы видим, любой гуманитарий.
Теперь же вернёмся к предмету настоящей статьи. Чтобы управлять роботележкой посредством смартфона, безусловно, необходимо написать для этого смартфона соответствующее приложение.
Я, как человек, месяц назад представлявший этот процесс крайне туманно, сейчас могу со всей ответственностью заявить, что дело в сущности это не сложное. Если конечно, у вас есть хоть какие-то начальные знания в области Java.
Ибо при написании Android приложений исходный код пишется на Java, а затем компилируется в стандартный байт-код Java с использованием традиционного инструментария Java. Затем с кодом происходят другие интересные вещи, но эти подробности нам здесь не нужны.
Вроде как, существуют еще возможности для написания приложений на С для отъявленных хардкорщиков ведущих счёт на наносекунды, а также где-то есть какой-то пакет для трансляции вашего кода с Питона, но здесь я ничего подсказать не могу, поскольку уже давно сделал правильный выбор.
Итак, Java и программный пакет Android Studio — интегрированная среда разработки (IDE) для работы с платформой Android основанная на программном обеспечении IntelliJ IDEA от компании JetBrains, официальное средство разработки Android приложений.
Если вы уже работаете с ПО от IntelliJ IDEA, то будете приятно удивлены знакомым интерфейсом.
С основами построения приложений я знакомился по книжке Б.Филлипса и К.Стюарта — «ANDROID» программирование для профессионалов". Как я понял, профессионалами авторы считают читателей, хотя бы немного знакомых с Java SE. Чего-то архи-сложного в этой книге я не нашел, а для наших целей вполне хватит и первого десятка глав книги, благо, что в ней все примеры кода приводятся при работе именно с вышеупомянутой Android Studio.
Отладку приложений можно проводить, как на программном эмуляторе, так и прямо на смартфоне, переключив его в «режим разработчика».
В предыдущей статье было описано управление тележкой через оконное приложение на Windows. То есть весь код для создания HTTP и UDP соединений, а также логика управления у нас уже по идее присутствует. Поэтому взяв на вооружение слоган компании Oracle «Написано в одном месте, работает везде» мы просто перекинем эти классы в новую программу уже для Android приложения. А вот GUI — графический интерфейс пользователя, по понятным причинам придется оставить там, где он был. Но с другой стороны, на Android всё делается очень похоже и довольно быстро, поэтому в накладе мы не останемся.
ТЫКАЕМ ПАЛЬЦЕМ В ЭКРАН

Итак создаем новый проект «FourWheelRobotControl» в Android Studio.
Это простое приложение и оно будет состоять из активности (activity)
Его писать ручками не надо, он генерится автоматически после ваших творений в редакторе.
Теперь просто перенесём два класса из программы приведенной в предыдущей статье:
Суть программы осталось той же. MainActivity сначала запускает HTTP и UDP клиенты, а затем ловит нажатия и отжатия экранных кнопок, отправляя код нажатия direction на формирование UDP пакета. А оттуда уже всё — «вперёд»,«назад»,«влево», «вправо» и при отжатии «стоп» уезжают по WI-FI на телегу.
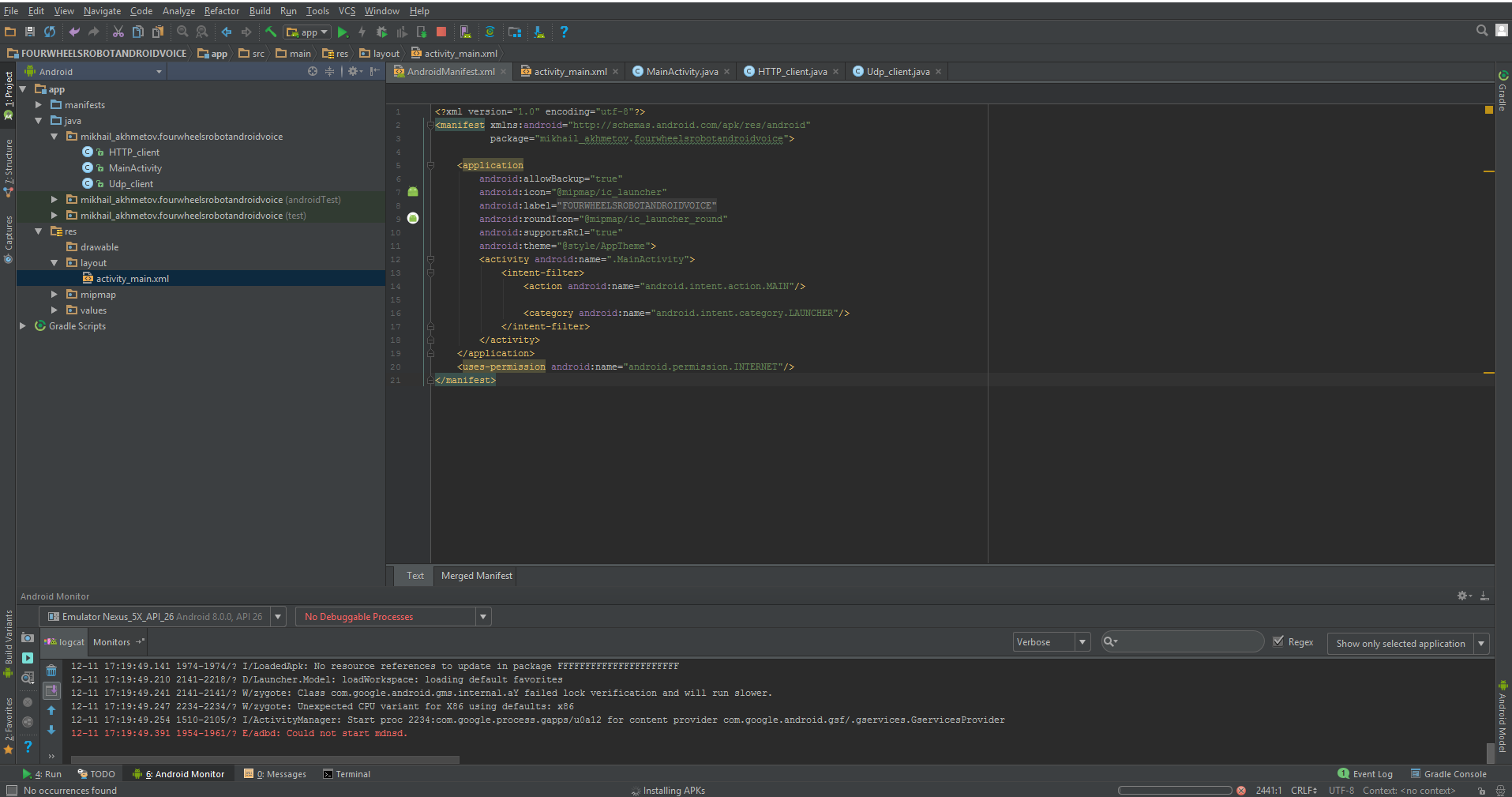
Кроме всего этого, мы должны немного подредактировать файл так называемого манифеста, который опять же, в основном генерится сам.
Манифест (manifest) представляет собой файл XML с метаданными, описывающими ваше приложение для ОС Android. Файл манифеста всегда называется AndroidManifest.xml и располагается в каталоге app/manifest вашего проекта.
Правда там нам работы совсем немного.
запрещаем повороты экрана:
разрешаем работу в интернет:
И вот он весь полностью.
При запуске мы должны увидеть что-то вроде:
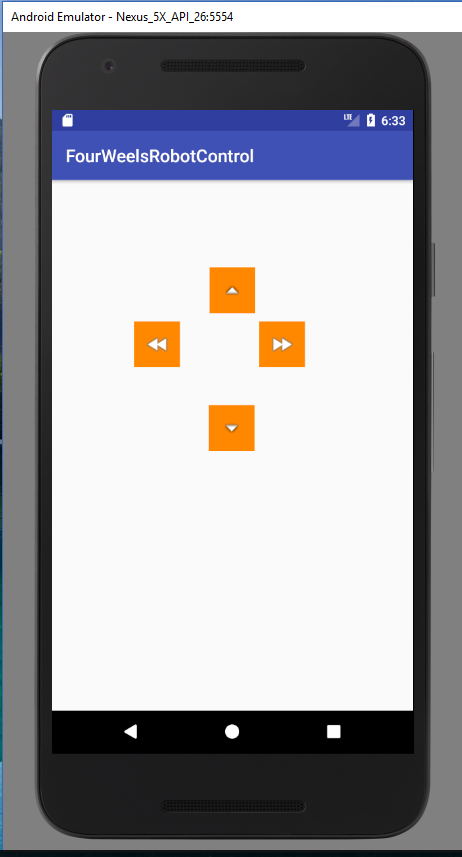
Вот в сущности и всё. Теперь тележкой можно управлять с мобильника. Приложение крайне простое, ибо демонстрационное, без каких-либо «свистелок и перделок», типа поиска телеги в домашней сети, коннекта, дисконнекта и прочих полезных фич, облегчающих жизнь, но затрудняющих понимание кода.
С другой стороны, управление при помощи экранных кнопок это то же самое,
«как пить просто водку, даже из горлышка — в этом нет ничего, кроме томления духа и суеты».
И Веня Ерофеев в этом был прав, безусловно.
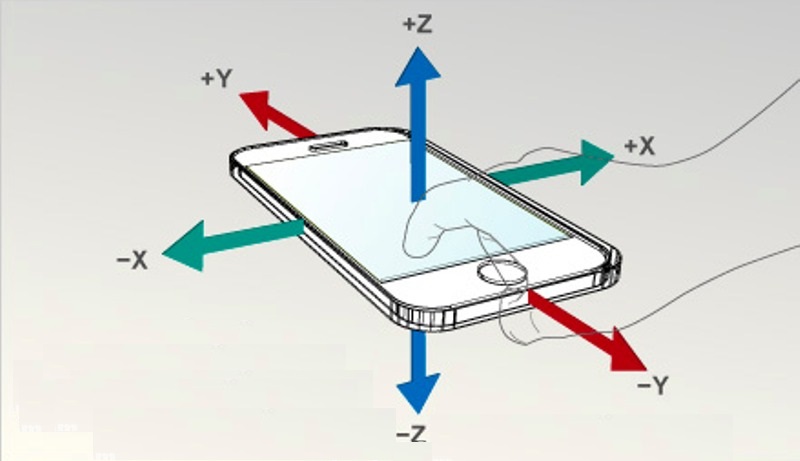
Гораздо интереснее, к примеру, рулить телегой при помощи штатных акселерометров того же смартфона.
Причём реализуется сия фича тоже крайне просто, через, так называемые интенты. Правда, создавать свои интенты сложнее, чем пользоваться готовыми. К счастью, пользоваться готовыми никто не запрещает.
АКСЕЛЕРОМЕТР В МАССЫ
Поэтому наш код в MainActivity (и только в нём) изменится минимально.
Добавим переменные для акселерометра:
Получим сам датчик от системы и зарегистрируем его как слушатель.
Имплементируем сам интерфейс слушателя:
И пропишем четыре обязательных метода из которых воспользуемся только последним. Методом, отрабатывающим при изменении показаний акселерометра. Вообще-то, я хотел акселерометр сам опрашивать, как обычную периферию с периодом около 100 мс, так как было подозрение (из-за названия onChanged), что метод отрабатывает слишком часто. Но там всё private и фиг за интерфейсы проберёшься.
Программа выводит показания датчиков по двум осям на экран смартфона. Вместо третьей оси, которая не используется, выводится переменная направления «direction». И эти же данные бегут в виде байтового потока на тележку. Правда, из-за того, что поток чисто байтовый, определить, где команда «вперед» или «стоп» было бы затруднительно. Поэтому я поступил просто: каждому направлению и углу наклона соответствует свой диапазон чисел. Грубо говоря 1-20 это «вперёд» с соответствующей скоростью, 21-40 это «назад» и так далее. Конечно, можно было бы передавать по UDP чисто данные, а сами управляющие команды задавать через TCP протокол и это было бы безусловно правильнее. Но для это надо редактировать программу на самой ESP8266, чего мне пока не хочется.
Итак, телега катается по квартире, чутко реагируя на наклоны моего GalaxyS7, но и это как говаривал небезызвестный Веня ещё не то.
«Теперь же я предлагаю вам последнее и наилучшее. «Венец трудов, превыше всех наград», как сказал поэт. Короче, я предлагаю вам коктейль «Сучий потрох», напиток, затмевающий все. Это уже не напиток — это музыка сфер. „
В наш век Сири и Алексы, чего-то там вертеть руками? Пусть слушается голосового управления!
А ТЕПЕРЬ СЛУШАЙ МЕНЯ!

На самом деле работать с распознаванием и синтезом речи в Android очень просто. Все сложные вычисления скрыты от нас в довольно элегантную библиотеку с простым API. Вы сможете осилить этот урок, даже если имеете весьма поверхностные знания о программировании для Android.
На самом деле же, у меня всё получилось довольно коряво, но скорее всего потому, что я использовал самый простой вариант, а как следует в данном API не копался. Делается всё тоже через интенты, при помощи которых мы обращаемся к голосовому движку Гугл, а именно к его функции распознавания речи. Поэтому потребуется рабочий Интернет.
Опять меняется лишь MainActivity.java, хотя я еще немного изменил и сам макет (четыре кнопки теперь там вовсе ни к чему, хватит и одной).
В MainActivity.java добавилось следующее:
Тот самый интент:
И то, что он возвращает:
А возвращает он массив похожих слов, причем в довольно “мусорной форме», со всякими скобочками и запятыми. И вам лишь остается выбрать слово похожее на то, которое вы сказали. Ну и соответственно, если попалось слово «вперёд», то едем вперёд, если «направо» то направо и так далее. Конечно, надо учитывать, где через «Ё», где запятая лишняя прицепится (скобочки-то я отрезал, а вот на запятые сил уже не хватило).
Ну и до кучи макет c одной кнопкой
Самое удивительное, что действительно ездиет и слушается голоса (как правило). Но, конечно, интерфейс тормозной; пока скажете, пока распознается и вернётся; короче скорость движения выбирайте заранее небольшую или помещение наоборот поширше.
На этом на сегодня всё, буду рад, если понравилось.
Предлагаю вам, уважаемые читатели GeekTimes, очередную статью из цикла по использованию микросхемы ESP8266 в качестве беспроводного моста для AVR микроконтроллеров, на примере аппаратной платформы Arduino Uno (Nano). В этот раз для полета на Луну управления платформой мы задействуем вместо компьютера устройство на базе «ANDROID». Ну, например, смартфон.
Подробности под катом:
Для нашей работы мы воспользуемся инструментарием, который был описан в предыдущей статье — беспроводным программатором BABUINO и модулем передачи кода и данных МPDE (module for programm and data exchange) прошиваемым в ESP8266.
Как выяснилось из откликов пользователей, сам программатор, в общем, пришелся ко двору и некоторые личности даже им успешно пользуются. Ну, в принципе, вещь действительно удобная; запустил приложение под виндой, выбрал hex файл из нужной папки и всё — через несколько секунд программка в нужном устройстве безо всяких проводов. Другое дело, что я зря с излишней горячностью нападал на пользователей софта ARDUINO, пишущих на Wiring C и пользующихся ARDUINO IDE с её скетчами и библиотеками. Безусловно, каждый делает как ему удобно — на ардуинском ли Wiring C или на С из AVR studio. Но в итоге, некоторые пользователи почему-то сразу решили, что программатор никак не совместим с ARDUINO софтом.
На самом деле, проблем с совместимостью, конечно же, никаких нет. Абсолютно также компилируете ваш скетч, где вам удобно до состояния hex файла и совершенно также просто отправляете его через беспроводной программатор на ваш Arduino UNO или NANO.
Обмен данными под софтом ARDUINO тоже никаких проблем не доставляет. Пишете волшебные строчки:
а дальше что-то типа:
receiveByte= Serial.read(); // чтение байта из буфера
Serial.write(receiveByte); // запись байта
И можете обмениваться байтовыми потоками по WI-FI совершенно спокойно. Ибо AVR микроконтроллер шлёт в ESP8266 и получает байты оттуда по последовательному порту UART, настроить работу с которым в Arduino может, как мы видим, любой гуманитарий.
Теперь же вернёмся к предмету настоящей статьи. Чтобы управлять роботележкой посредством смартфона, безусловно, необходимо написать для этого смартфона соответствующее приложение.
Я, как человек, месяц назад представлявший этот процесс крайне туманно, сейчас могу со всей ответственностью заявить, что дело в сущности это не сложное. Если конечно, у вас есть хоть какие-то начальные знания в области Java.
Ибо при написании Android приложений исходный код пишется на Java, а затем компилируется в стандартный байт-код Java с использованием традиционного инструментария Java. Затем с кодом происходят другие интересные вещи, но эти подробности нам здесь не нужны.
Вроде как, существуют еще возможности для написания приложений на С для отъявленных хардкорщиков ведущих счёт на наносекунды, а также где-то есть какой-то пакет для трансляции вашего кода с Питона, но здесь я ничего подсказать не могу, поскольку уже давно сделал правильный выбор.
Итак, Java и программный пакет Android Studio — интегрированная среда разработки (IDE) для работы с платформой Android основанная на программном обеспечении IntelliJ IDEA от компании JetBrains, официальное средство разработки Android приложений.
Если вы уже работаете с ПО от IntelliJ IDEA, то будете приятно удивлены знакомым интерфейсом.
С основами построения приложений я знакомился по книжке Б.Филлипса и К.Стюарта — «ANDROID» программирование для профессионалов". Как я понял, профессионалами авторы считают читателей, хотя бы немного знакомых с Java SE. Чего-то архи-сложного в этой книге я не нашел, а для наших целей вполне хватит и первого десятка глав книги, благо, что в ней все примеры кода приводятся при работе именно с вышеупомянутой Android Studio.
Отладку приложений можно проводить, как на программном эмуляторе, так и прямо на смартфоне, переключив его в «режим разработчика».
В предыдущей статье было описано управление тележкой через оконное приложение на Windows. То есть весь код для создания HTTP и UDP соединений, а также логика управления у нас уже по идее присутствует. Поэтому взяв на вооружение слоган компании Oracle «Написано в одном месте, работает везде» мы просто перекинем эти классы в новую программу уже для Android приложения. А вот GUI — графический интерфейс пользователя, по понятным причинам придется оставить там, где он был. Но с другой стороны, на Android всё делается очень похоже и довольно быстро, поэтому в накладе мы не останемся.
ТЫКАЕМ ПАЛЬЦЕМ В ЭКРАН
Итак создаем новый проект «FourWheelRobotControl» в Android Studio.
Это простое приложение и оно будет состоять из активности (activity)
Его писать ручками не надо, он генерится автоматически после ваших творений в редакторе.
Теперь просто перенесём два класса из программы приведенной в предыдущей статье:
Суть программы осталось той же. MainActivity сначала запускает HTTP и UDP клиенты, а затем ловит нажатия и отжатия экранных кнопок, отправляя код нажатия direction на формирование UDP пакета. А оттуда уже всё — «вперёд»,«назад»,«влево», «вправо» и при отжатии «стоп» уезжают по WI-FI на телегу.
Кроме всего этого, мы должны немного подредактировать файл так называемого манифеста, который опять же, в основном генерится сам.
Манифест (manifest) представляет собой файл XML с метаданными, описывающими ваше приложение для ОС Android. Файл манифеста всегда называется AndroidManifest.xml и располагается в каталоге app/manifest вашего проекта.
Правда там нам работы совсем немного.
запрещаем повороты экрана:
разрешаем работу в интернет:
И вот он весь полностью.
При запуске мы должны увидеть что-то вроде:
Вот в сущности и всё. Теперь тележкой можно управлять с мобильника. Приложение крайне простое, ибо демонстрационное, без каких-либо «свистелок и перделок», типа поиска телеги в домашней сети, коннекта, дисконнекта и прочих полезных фич, облегчающих жизнь, но затрудняющих понимание кода.
С другой стороны, управление при помощи экранных кнопок это то же самое,
«как пить просто водку, даже из горлышка — в этом нет ничего, кроме томления духа и суеты».
И Веня Ерофеев в этом был прав, безусловно.
Гораздо интереснее, к примеру, рулить телегой при помощи штатных акселерометров того же смартфона.
Причём реализуется сия фича тоже крайне просто, через, так называемые интенты. Правда, создавать свои интенты сложнее, чем пользоваться готовыми. К счастью, пользоваться готовыми никто не запрещает.
АКСЕЛЕРОМЕТР В МАССЫ
Поэтому наш код в MainActivity (и только в нём) изменится минимально.
Добавим переменные для акселерометра:
Получим сам датчик от системы и зарегистрируем его как слушатель.
Имплементируем сам интерфейс слушателя:
И пропишем четыре обязательных метода из которых воспользуемся только последним. Методом, отрабатывающим при изменении показаний акселерометра. Вообще-то, я хотел акселерометр сам опрашивать, как обычную периферию с периодом около 100 мс, так как было подозрение (из-за названия onChanged), что метод отрабатывает слишком часто. Но там всё private и фиг за интерфейсы проберёшься.
Программа выводит показания датчиков по двум осям на экран смартфона. Вместо третьей оси, которая не используется, выводится переменная направления «direction». И эти же данные бегут в виде байтового потока на тележку. Правда, из-за того, что поток чисто байтовый, определить, где команда «вперед» или «стоп» было бы затруднительно. Поэтому я поступил просто: каждому направлению и углу наклона соответствует свой диапазон чисел. Грубо говоря 1-20 это «вперёд» с соответствующей скоростью, 21-40 это «назад» и так далее. Конечно, можно было бы передавать по UDP чисто данные, а сами управляющие команды задавать через TCP протокол и это было бы безусловно правильнее. Но для это надо редактировать программу на самой ESP8266, чего мне пока не хочется.
Итак, телега катается по квартире, чутко реагируя на наклоны моего GalaxyS7, но и это как говаривал небезызвестный Веня ещё не то.
«Теперь же я предлагаю вам последнее и наилучшее. «Венец трудов, превыше всех наград», как сказал поэт. Короче, я предлагаю вам коктейль «Сучий потрох», напиток, затмевающий все. Это уже не напиток — это музыка сфер. „
В наш век Сири и Алексы, чего-то там вертеть руками? Пусть слушается голосового управления!
А ТЕПЕРЬ СЛУШАЙ МЕНЯ!
На самом деле работать с распознаванием и синтезом речи в Android очень просто. Все сложные вычисления скрыты от нас в довольно элегантную библиотеку с простым API. Вы сможете осилить этот урок, даже если имеете весьма поверхностные знания о программировании для Android.
На самом деле же, у меня всё получилось довольно коряво, но скорее всего потому, что я использовал самый простой вариант, а как следует в данном API не копался. Делается всё тоже через интенты, при помощи которых мы обращаемся к голосовому движку Гугл, а именно к его функции распознавания речи. Поэтому потребуется рабочий Интернет.
Опять меняется лишь MainActivity.java, хотя я еще немного изменил и сам макет (четыре кнопки теперь там вовсе ни к чему, хватит и одной).
В MainActivity.java добавилось следующее:
Тот самый интент:
И то, что он возвращает:
А возвращает он массив похожих слов, причем в довольно “мусорной форме», со всякими скобочками и запятыми. И вам лишь остается выбрать слово похожее на то, которое вы сказали. Ну и соответственно, если попалось слово «вперёд», то едем вперёд, если «направо» то направо и так далее. Конечно, надо учитывать, где через «Ё», где запятая лишняя прицепится (скобочки-то я отрезал, а вот на запятые сил уже не хватило).
Ну и до кучи макет c одной кнопкой
Самое удивительное, что действительно ездиет и слушается голоса (как правило). Но, конечно, интерфейс тормозной; пока скажете, пока распознается и вернётся; короче скорость движения выбирайте заранее небольшую или помещение наоборот поширше.
На этом на сегодня всё, буду рад, если понравилось.
Микросхема ESP8266 – один из самых популярных инструментов для организации беспроводной связи в проектах умного дома. С помощью беспроводного контроллера можно организовывать связь по интерфейсу WiFi, обеспечивая проектам Arduino выход в интернет и возможность дистанционного управления и сбора данных. На основе ESP8266 созданы такие популярные платы как WeMos и NodeMcu, а также огромное количество самодельных проектов. В этой статье, мы узнаем, что из себя представляет ESP82266, какие бывают ее разновидности, как работать с ESP8266 в среде Arduino IDE.
Описание ESP8266
 ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
Контроллер недорогой, обладает небольшим количеством внешних элементов и имеет следующие технические параметры:
- Поддерживает Wi-Fi протоколы 802.11 b/g/n с WEP, WPA, WPA2;
- Обладает 14 портами ввода и вывода, SPI, I2C, UART, 10-бит АЦП;
- Поддерживает внешнюю память до 16 МБ;
- Необходимое питание от 2,2 до 3,6 В, потребляемый ток до 300 мА в зависимости от выбранного режима.
Важной особенностью является отсутствие пользовательской энергонезависимой памяти на кристалле. Программа выполняется от внешней SPI ПЗУ при помощи динамической загрузки необходимых элементов программы. Доступ к внутренней периферии можно получить не из документации, а из API набора библиотек. Производителем указывается приблизительное количество ОЗУ – 50 кБ.
Особенности платы ESP8266:
- Удобное подключение к компьютеру – через USB кабель, питание от него же;
- Наличие встроенного преобразователя напряжения 3,3В;
- Наличие 4 Мб флеш-памяти;
- Встроенные кнопки для перезагрузки и перепрошивки;
- Все порты выведены на плату на две гребенки с шагом 2,5 мм.
Сферы применения модуля ESP8266
- Автоматизация;
- Различные системы для умного дома: Беспроводное управление, беспроводные розетки, управление температурой, дополнение к сигнализационным системам;
- Мобильная электроника;
- >Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным вариантом является ESP 01.

Исполнение программы требуется задавать состоянием портов GPIO0, GPIO2 и GPIO15, когда заканчивается подача питания. Можно выделить 2 важных режима – когда код исполняется из UART (GPIO0 = 0, GPIO2 = 1 и GPIO15 = 0) для перепрошивки флеш-карты и когда исполняется из внешней ПЗУ (GPIO0 = 1, GPIO2 = 1 и GPIO15 = 0) в штатном режиме.
Распиновка для ESP01 изображена на картинке.
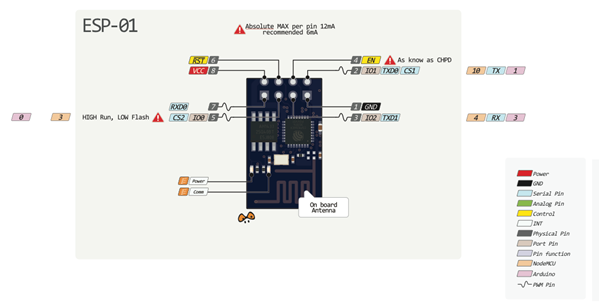

- 1 – земля, 8 – питание. По документации напряжение подается до 3,6 В – это важно учесть при работе с Ардуино, на которую обычно подают 5 В.
- 6 – RST, нужна для перезагрузки микроконтроллера при подаче на него низкого логического уровня.
- 4 – CP_PD, также используется для перевода устройства в энергосберегающий режим.
- 7 и 0 – RXD0 и TXD0, это аппаратный UART, необходимый для перепрошивки модуля.
- 2 – TXD0, к этому контакту подключается светодиод, который загорается при низком логическом уровне на GPIO1 и при передаче данных по UART.
- 5 – GPIO0, порт ввода и вывода, также позволяет перевести устройство в режим программирования (при подключении порта к низкому логическому уровню и подачи напряжения) .
- 3 – GPIO2, порт ввода и вывода.

Основные отличия Ардуино от ESP8266
- ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая память;
- Процессор ESP8266 быстрее, чем у Ардуино;
- Наличие Wi-Fi у ESP8266;
- ESP8266 потребляеn больше тока, чем для Ардуино;
Программирование ESP8266 в Arduino IDE
Программный комплект разработчика esp8266 включает в себя:
- Компилятор из пакета GNU Compiler Collection.
- Библиотеки, стеки протоколов WiFi, TCP/IP.
- Средство загрузки информации в программу контроллера.
- Операционная IDE.
Изначально модули ESP8266 поставляются с прошивкой от фирмы-изготовителя. С ее помощью можно управлять модулем с внешнего микроконтроллера, реализовывать работу с Wi-Fi как с модемом. Также существует множество других готовых прошивок. Некоторые из них позволяют настраивать работу модуля при помощи WEB-интерфейса.
Можно программировать из среды Arduino IDE. При ее помощи можно легко писать скетчи и загружать их в ESP8266, прошивать ESP8266, при этом не требуется сама плата Ардуино. Arduino IDE поддерживает все виды модулей ESP8266.
В настоящий момент для ESP8266 можно реализовать следующие функции:
- Основные функции языка Wiring. Управлять портами GPIO можно точно так же, как и пинами на плате Ардуино: pinMode, digitalRead, digitalWrite, analogWrite. Команда analogRead(А0) позволяет считать значения АЦП. При помощи команды analogWrite (pin, value) можно подключить ШИМ на нужном выходе GPIO. При value=0 ШИМ отключается, максимальное значение достигает константы, равной 1023.С помощью функций attachInterrupt, detachInterrupt можно выполнять прерывание на любом порте GPIO, кроме 16.
- Тайминг и delay. Используя команды millis и micros можно вернуть мс и мкс, которые прошли с момента старта. Delay позволяет приостановить исполнение программы на нужное время. Также функция delay(…) позволяет поддерживать нормальную работу Wi-Fi, если в скетче присутствуют большие элементы, которые выполняются более 50 мс. Yield() – аналог функции delay(0).
- Serial и Serial1 (UART0 и UART1). Работа Serial на ESP8266 аналогична работе на ардуино. Запись и чтение данных блокируют исполнение кода, если FIFO на 128 байт и программный буфер на 256 байт заполнены. Объект Serial пользуется аппаратным UART0, для него можно задать пины GPIO15 (TX) и GPIO13 (RX) вместо GPIO1(TX) и GPIO3(RX). Для этого после функции Serial.begin(); нужно вызвать Serial.swap();. Аналогично Serial1 использует UART1, который работает на передачу. Необходимый пин для этого GPIO2.
- Макрос PROGMEM. Его работа аналогична работе в Ардуино. Позволяет перемещать данные read only и строковые постоянные во flash-память. При этом в ESP8266 не сохраняются одинаковые константы, что приводит к дополнительной трате флеш-памяти.
- I2C. Перед началом работы с шиной I2C выбираются шины с помощью функции Wire.pins(int sda, int scl).
- SPI, OneWire – поддерживаются полностью.
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно помнить, что у ESP8266 напряжение питания не может быть выше 3,6, в то время как на пате Ардуино напряжение равно 5 В. Соединять 2 микроконтроллера нужно с помощью резистивных делителей. Перед подключением модуля нужно ознакомиться с распиновкой выбранного ESP8266. Схема подключения для ESP8266-01 представлена на рисунке.
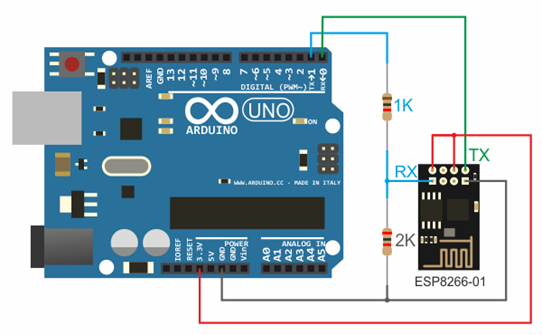
3,3 В с Ардуино – на Vcc&CH_PD на модуле ESP8266, Земля с Ардуино – к земле с ESP8266, 0 – TX, 1 – RX.
Для поддержки стабильной работы ESP8266 необходим источник постоянного напряжения на 3,3 В и максимальный ток 250 мА. Если питание происходит от конвертера USB-TTL, могут происходить неполадки и сбои в работе.
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей:
- mode(m) – для выбора одного из трех режимов: клиент, точка доступа или оба режима единовременно.
- softAP(ssid) – нужен для создания открытой точки доступа.
- softAP(ssid, password) – создает точку доступа с паролем, который должен состоять не менее чем из 8 знаков.
- WiFi.macAddress(mac) и WiFi.softAPmacAddress(mac)– определяет МАС адрес.
- WiFi.localIP() и WiFi.softAPIP() – определение IP адреса.
- printDiag(Serial); – позволят узнать данные о диагностике.
- WiFiUDP – поддержка передачи и приема multicast пакета в режиме клиента.
Работа выполняется по следующему алгоритму:
- Подключение USB-TTL к USB и к ESP.
- Запуск Arduino >NodeMCU на базе esp8266
 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
Большим преимуществом платы является ее малое энергопотребление. Нередко их используют в схемах с автономным питанием. На плате расположены всего 11 портов общего назначения, из них некоторые имеют специальные функции:
- D1 и D2 – для интерфейса I2C/ TWI;
- D5-D8- для интерфейса SPI;
- D9, D10 – для UART;
- D1-D10 – могут работать как ШИМ.
Платформа имеет современное API для аппаратного ввода и вывода. Это позволяет сократить количество действий во время работы с оборудованием и при его настройке. С помощью прошивки NodeMCU можно задействовать весь рабочий потенциал для быстрой разработки устройства.
WeMos на базе esp8266
 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
Для работы с модулем нужно установить драйвер CH340 и настроить Ардуино IDE под ESP8266. Для этого нужно в меню настройки в строке «дополнительная ссылка для менеджера плат» добавить адрес http://arduino.esp8266.com/stable/package_esp8266com_index.json.
После этого требуется найти пакет esp8266 by ESP8266 и установить его. Затем нужно выбрать в меню инструменты микроконтроллер Wemos D1 R2 и записать нужный скетч.
Выводы по ESP8266
С помощью плат на основе микросхемы ESP8266 вы можете добавить в свои проекты возможности “большого интернета”, сделав их гораздо более интеллектуальными. Дистанционное управление, сбор и анализ данных на сервере, обработка голоса и работа с изображением – все это становится доступным, когда мы подключаем наш проект по WiFi к интернету. В следующих статьях мы подробно рассмотрим то, как можно программировать устройства на базе esp8266, а также уделим внимание таким популярным платам как WeMos и NodeMcu.