
Содержание
Момент инерции тела относительно какой-либо оси можно найти вычислением. Если вещество в теле распределено непрерывно, то вычисление момента инерции его сводится к вычислению интеграла
 , (4.14)
, (4.14)
в котором r – расстояние от элемента массы dm до оси вращения.
Момент инерции тонкого однородного стержня относительно перпендикулярной оси. Пусть ось проходит через конец стержня А (рис. 4.4).
Для момента инерции можно написать IA = kml 2 , где l – длина стержня, k – коэффициент пропорциональности. Центр стержня С является его центром масс. По теореме Штейнера IA = IC + m(l/2) 2 . Величину IC можно представить как сумму моментов инерции двух стержней, СА и СВ, длина каждого из которых равна l/2, масса m/2, а следовательно, момент инерции равен  Таким образом, IC = km(l/2) 2 . Подставляя эти выражения в формулу для теоремы Штейнера, получим
Таким образом, IC = km(l/2) 2 . Подставляя эти выражения в формулу для теоремы Штейнера, получим
 ,
,
откуда k = 1/3. В результате находим
 (4.15)
(4.15)
 (4.16)
(4.16)
Момент инерции бесконечно тонкого круглого кольца (окружности). Момент инерции относительно оси Z (рис. 4.5) равен
где R – радиус кольца. Ввиду симметрии IX = IУ.
Формула (4.17) очевидно, дает также момент инерции полого однородного цилиндра с бесконечно тонкими стенками относительно его геометрической оси.
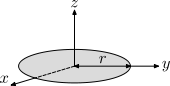
Момент инерции бесконечно тонкого диска и сплошного цилиндра. Предполагается, что диск и цилиндр однородны, т. е. вещество распределено в них с постоянной плотностью. Пусть ось Z проходит через центр диска С перпендикулярно к его плоскости (рис. 4.6). Рассмотрим бесконечно тонкое кольцо с внутренним радиусом r и наружным радиусом r + dr. Площадь такого кольца dS = 2prdr. Его момент инерции найдется по формуле (4.17), он равен dIz = r 2 dm. Момент инерции всего диска определяется интегралом  Ввиду однородности диска dm =
Ввиду однородности диска dm =  , где S = pR 2 – площадь всего диска. Вводя это выражение под знак интеграла, получим
, где S = pR 2 – площадь всего диска. Вводя это выражение под знак интеграла, получим
 (4.18)
(4.18)
Формула (4.18) дает также момент инерции однородного сплошного цилиндра относительно его продольной геометрической оси.
Вычисление момента инерции тела относительно оси часто можно упростить, вычислив предварительно момент инерции его относительно точки. Сам по себе момент инерции тела относительно точки не играет никакой роли в динамике. Он является чисто вспомогательным понятием, служащим для упрощения вычислений. Моментом инерции тела относительно точки О называется сумма произведений масс материальных точек, из которых тело состоит, на квадраты их расстояний R до точки О: q = ΣmR 2 . В случае непрерывного распределения масс эта сумма сводится к интегралу q = ∫R 2 dm. Само собой понятно, что момент θ не следует смешивать с моментом инерции I относительно оси. В случае момента I массы dm умножаются на квадраты расстояний до этой оси, а в случае момента θ – до неподвижной точки.
Рассмотрим сначала одну материальную точку с массой m и с координатами x, у, z относительно прямоугольной системы координат (рис. 4.7). Квадраты расстояний ее до координатных осей Х, Y, Z равны соответственно у 2 + z 2 , z 2 + x 2 , x 2 + у 2 , а моменты инерции относительно тех же осей
Но х 2 + у 2 + z 2 = R 2 , где R – расстояние точки m от начала координат О. Поэтому
Это соотношение справедливо не только для одной материальной точки, но и для произвольного тела, так как тело можно рассматривать как совокупность материальных точек. Таким образом, сумма моментов инерции тела относительно трех взаимно перпендикулярных осей, пересекающихся в одной точке О, равна удвоенному моменту инерции того же тела относительно этой точки.
Момент инерции полого шара с бесконечно тонкими стенками.
Сначала найдем момент инерции θ относительно центра шара. Очевидно, он равен θ = mR 2 . Затем применяем формулу (4.19). Полагая в ней ввиду симметрии IX = IY = IZ = I. В результате находим момент инерции полого шара относительно его диаметра
 . (4.20)
. (4.20)
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: При сдаче лабораторной работы, студент делает вид, что все знает; преподаватель делает вид, что верит ему. 9530 —  | 7348 —
| 7348 —  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Приведены формулы моме́нтов ине́рции для ряда массивных твёрдых тел различной формы. Момент инерции массы имеет размерность масса × длину 2 . Он является аналогом массы при описании вращательного движения. Не следует путать его с моментом инерции плоских сечений [ уточнить ] , который используется при расчетах изгибов.
Моменты инерции в таблице рассчитаны для постоянной плотности по всему объекту. Также предполагается, что ось вращения проходит через центр масс, если не указано иное.
| Описание | Изображение | Моменты инерции | Комментарии |
|---|---|---|---|
| Тонкая цилиндрическая оболочка с открытыми концами радиуса r и массы m |  |
I = m r 2 <displaystyle I=mr^<2>>  [1] [1] |
Предполагается, что толщина корпуса пренебрежимо мала. Этот объект является частным случаем нижеследующего при r1=r2. |
Кроме того, точка массы m на конце стержня длиной r имеет тот же момент инерции, а r называется радиусом инерции.

ight)>
[1] [2] I x = I y = 1 12 m [ 3 ( r 2 2 + r 1 2 ) + h 2 ] <displaystyle I_
ight)+h^<2>
ight]>
или при определении нормированной толщины tn = t/r и полагая r = r2,
тогда I z = m r 2 ( 1 − t n + 1 2 t n 2 ) <displaystyle I_
ight)>
ho hleft(<2>>^<4>-<1>>^<4>
ight)>
 [1]
[1] I x = I y = 1 12 m ( 3 r 2 + h 2 ) <displaystyle I_
ight)>
I x = I y = m r 2 4 <displaystyle I_

I x = I y = m r 2 2 <displaystyle I_
 [1]
[1] 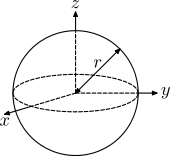 [1]
[1] 
 [3]
[3] I x = I y = 3 5 m ( r 2 4 + h 2 ) <displaystyle I_
ight)>
[3]
ight)>
I w = 1 12 m ( h 2 + d 2 ) <displaystyle I_
ight)>
I d = 1 12 m ( h 2 + w 2 ) <displaystyle I_
ight)>
, I C M = m s 2 6 <displaystyle I_.
ight)><6left(L^<2>+W^<2>+D^<2>
ight)>>>
, I = m s 2 6 <displaystyle I=<frac <2>><6>>> .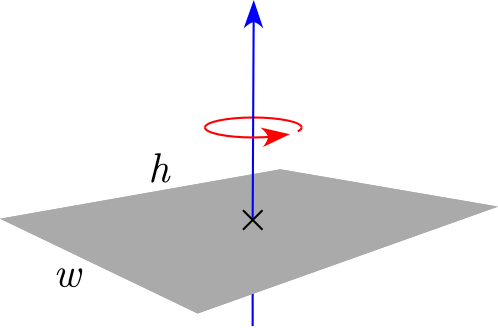 [1]
[1] [1]
[1](Ось вращения в конце пластины)
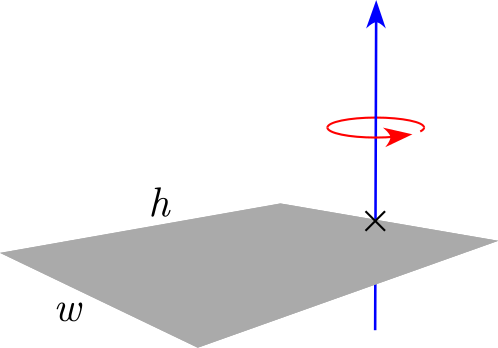
(Ось вращения на конце стержня)
 [1]
[1]
ight)m>
[4] Ось вращения относительно вертикальной оси: ( a 2 + 3 4 b 2 ) m <displaystyle left(a^<2>+<frac <3><4>>b^<2>
ight)m>
[4] >_<1>>
>_<2>>
>_<3>>
>_

>_ imes <vec
>_
>_^<2>+<vec
>_cdot <vec
>_
>_
>_ imes <vec
>_
(т.е. ρ ( x , y ) = m 2 π a b e − ( ( x / a ) 2 + ( y / b ) 2 ) / 2 <displaystyle
ho (x,y)=< frac
где: ρ ( x , y ) <displaystyle
ho (x,y)>
Как известно, масса в динамике поступательного движения играет важную роль, определяя инерционные свойства движущихся тел. В динамике вращения вместо массы пользуются моментом инерции. Рассмотрим в статье, что это за величина и как определяется момент инерции цилиндра относительно оси.
Что такое момент инерции?
Эту величину обычно обозначают буквой I. Для материальной точки математическая формула момента инерции записывается так:
Где r — расстояние до оси вращения от точки массой m. Из формулы понятно, что единицей измерения величины являются килограммы на квадратный метр (кг*м 2 ).
Если тело имеет сложную форму и его объемная плотность является переменной, тогда для определения I следует использовать такое интегральное выражение:
Где dm — это элементарная масса, находящаяся от оси вращения на расстоянии r.
Таким образом, момент инерции определяет распределение материи в теле сложной формы относительно конкретной оси вращения системы.
Сплошной цилиндр и главная ось
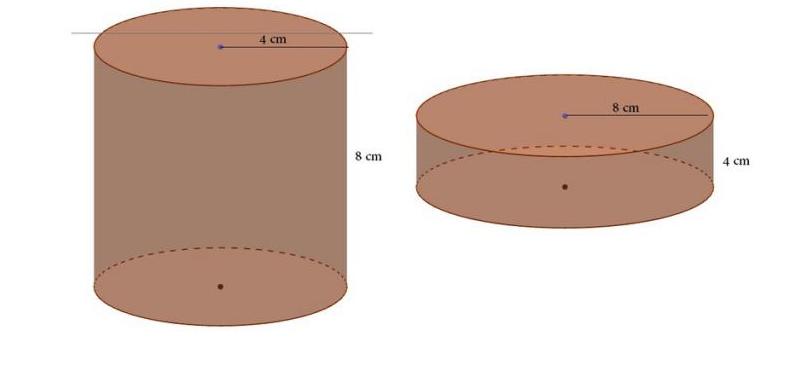
Момент инерции сплошного цилиндра может быть вычислен вокруг абсолютно любой оси с использованием интегрального выражения, записанного в предыдущем пункте. Здесь рассмотрим ситуацию, когда цилиндр массой M, радиусом R и высотой L вращается вокруг главной оси. Последняя представляет собой прямую, параллельную генератрисе фигуры и проходящую через центры ее круглых оснований.
Не будем вдаваться в подробности математических вычислений по интегральной формуле, а приведем сразу конечное выражение:
Мы видим, что чем больше масса цилиндра и его радиус, тем больше момент инерции I1. В то же время эта величина никак не зависит от высоты фигуры L, то есть момент инерции тонкого диска можно вычислить также по этой формуле.
Отметим, что если всю массу цилиндра собрать в одну материальную точку, находящуюся от оси вращения на расстоянии радиуса R, то для нее момент инерции окажется в два раза больше, чем для сплошного цилиндра.
Однородный цилиндр и перпендикулярная генератрисе ось
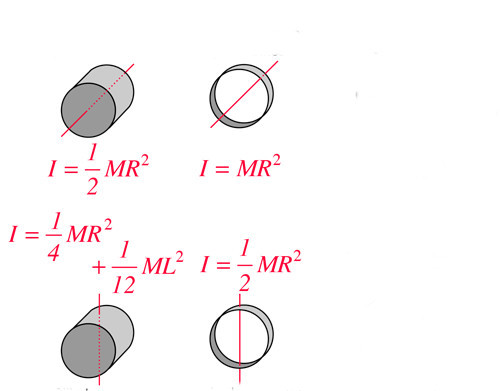
Теперь возьмем однородный цилиндр из примера выше и перевернем его на бок. Начнем вращать объект вокруг оси, которая проходит также через центр его масс, но уже перпендикулярна генератрисе (главной оси). Чему будет равен момент инерции цилиндра однородного в данном случае?
Как и в примере выше, здесь также ограничимся приведением соответствующего выражения. Оно будет иметь следующий вид:
Момент инерции I2 имеет более сложную зависимость от параметров цилиндра, чем I1, поскольку он определяется не только массой и радиусом, но и высотой фигуры. Заметим, что два слагаемых этой формулы представляют собой два крайних случая:
- Если цилиндр слишком маленькую высоту имеет, то мы получаем диск, который, вращаясь вокруг оси, проходящей через его диаметр, будет иметь момент 1/4*M*R 2 .
- Если радиус цилиндра стремится к нулю, то рассматриваемый объект превратится в стержень, и его момент инерции станет равным 1/12*M*L 2 .
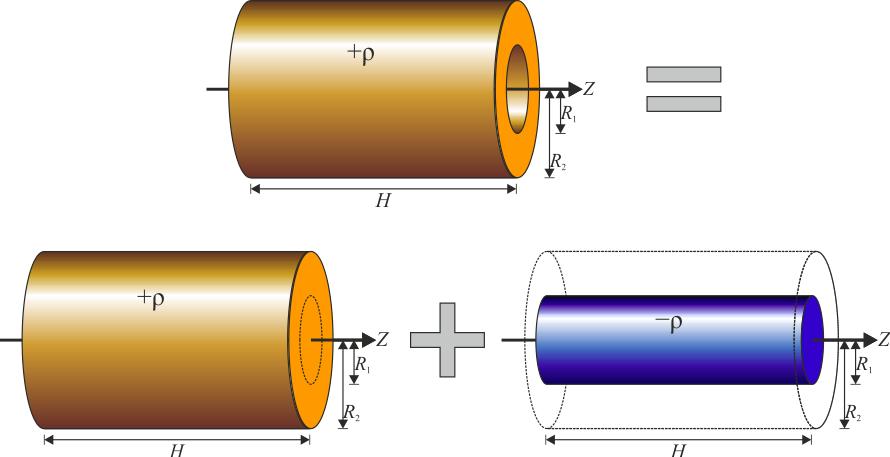
Полый цилиндр
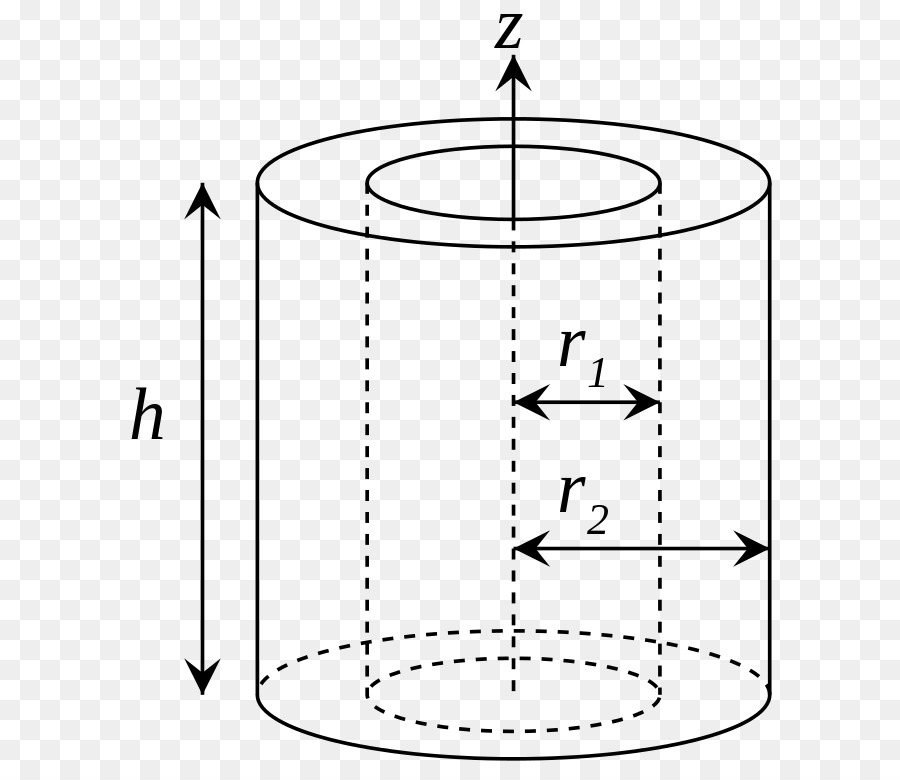
Выше мы рассмотрели, как рассчитывать момент инерции цилиндра вращающегося и однородного. Теперь предположим, что высота цилиндра и его масса остались теми же самыми, однако он стал полым, то есть, имеет два радиуса: внешний R1 и внутренний R2.
Применение все той же интегральной формулы позволяет получить выражение для момента инерции цилиндра полого, который вращается вокруг своей главной оси. Соответствующая формула выглядит так:
Это выражение позволяет сделать важный вывод: при одинаковых массах полого и сплошного цилиндров первый обладает большим моментом инерции. Связан этот факт с тем, что большая часть массы полого цилиндра находится дальше от оси вращения, а как видно из формул, от радиуса изучаемая величина растет квадратично.

Где используются знания величин I для цилиндров?
Пожалуй, основной областью применения изложенной выше теории является автомобильная промышленность. В частности, коленчатый вал автомобиля снабжен тяжелым сплошным маховиком, имеющим цилиндрическую форму. Необходим маховик для того, чтобы обеспечить максимальную плавность вращения коленчатого вала, что отражается на плавности автомобильного хода. Маховик гасит любые большие угловые ускорения как во время разгона транспортного средства, так при его торможении.

Из формулы выше для момента инерции I1 понятно, что для увеличения этой величины выгоднее увеличить радиус, чем массу цилиндра (маховика). Так, удвоение массы приведет лишь к удвоению момента инерции. Однако если увеличить в два раза радиус, то I1 возрастет аж в 4 раза, что обеспечит более эффективное использование маховика.
Пример решения задачи
Прежде чем решать задачу, скажем несколько слов о динамике вращения. Как и в динамике поступательного движения, в ней существует формула, подобная второму закону Ньютона. Эта формула называется уравнением моментов. Записывается она так:
Где L — момент импульса, M — момент внешних сил. Чаще всего это уравнение записывают в следующем виде:
Здесь α — ускорение угловое. Из этого выражения видна аналогия со вторым ньютоновским законом.
Теперь перейдем к решению задачи. Известно, что сила в 100 Н действует по касательной к цилиндрической поверхности перпендикулярно главной оси вращения сплошного цилиндра на расстоянии 20 см. Масса цилиндра равна 10 кг, а его радиус составляет 20 см. Необходимо определить угловую скорость ω цилиндра через 5 секунд после начала действия силы.
Угловая скорость рассчитывается по формуле для равноускоренного движения:
Выражая ускорение из уравнения моментов и подставляя его в выражение, получим:
Момент силы вычисляется так:
Где по условию задачи d = R. Подставляя это выражение и выражение для I сплошного цилиндра, получим конечную рабочую формулу:
Осталось сюда подставить все величины в единицах СИ и записать ответ: ω = 500 рад/с, что равно приблизительно 80 оборотам в секунду.