
Содержание

Введение:
В этом уроке мы создадим машинку, которая будет ездить по траектории нарисованной линии, а также останавливаться при обнаружении препятствий.
При создании любого робота, его нужно оснастить датчиками (показания которых будет считывать робот), управляющими модулями (для вывода результатов работы робота), и скетчем (по алгоритму которого должен работать робот). В нашем случае, мы оснастим машинку, тремя аналоговыми датчиками линий и одним ультразвуковым датчиком расстояния, а в роли управляющих модулей выступят два закрепленных к каркасе моторчика, с колёсами на валах.
Видео:
Нам понадобится:
- Arduino Uno х 1шт.
- Motor Shield (на 2 канала) x 1шт.
- Аналоговый датчик линии x 3шт.
- Машинка (базовый комплект)
Для реализации проекта нам необходимо установить библиотеку:
- iarduino_HC_SR04_int для работы с ультразвуковыми датчиками расстояния по внешним прерываниям.
О том как устанавливать библиотеки, Вы можете ознакомиться на странице Wiki — Установка библиотек в Arduino IDE .
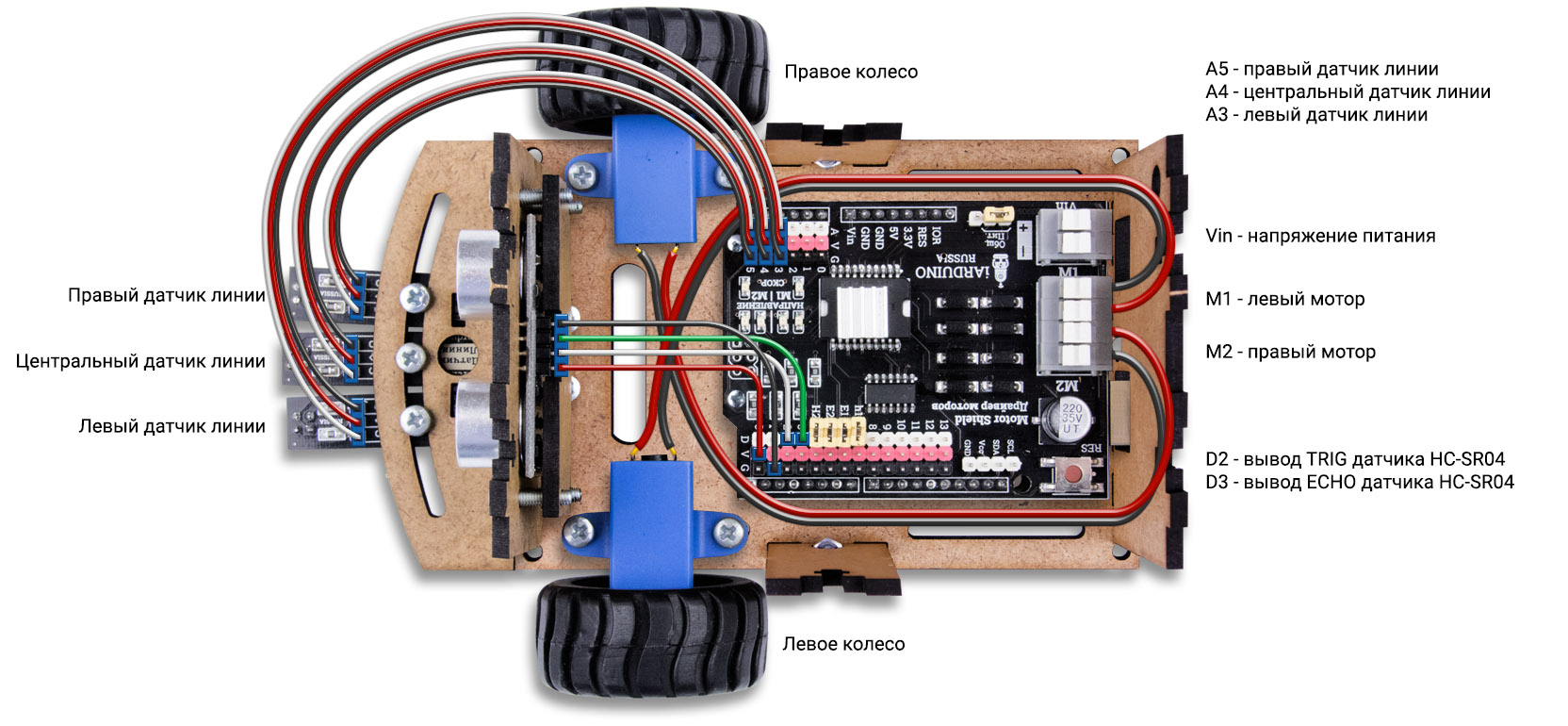
Схема подключения:
Моторчики подключаются к клеммам M1 (левый мотор) и M2 (правый мотор) расположенным на Motor Sield. Аналоговые датчики линии подключаются к любым аналоговым входам Arduino Uno, в нашем примере используются входы A5 (для правого датчика), A4 (для центрального датчика) и A3 (для левого датчика). Вывод TRIG ультразвукового датчика расстояния подключается к любому выводу Arduino Uno, в нашем случае вывод D2. Вывод ECHO, при использовании библиотеки iarduino_HC_SR04_int, может подключаться только к тем выводам Arduino Uno, которые используют внешние прерывания, в нашем случае это вывод D3. Все датчики запитаны от напряжения 5 В. Напряжение питания на Arduino Unoподаётся через Motor Shield (клеммник Vin), для чего нужно установить перемычку, рядом с клеммником, в позицию «Общ. Пит.». Входы Motor Shield H1 (направление 1 мотора), E1 (ШИМ 1 мотора), E2 (ШИМ 2 мотора), H2 (направление 2 мотора), по умолчанию, подключены к выводам D7, D6, D5 и D4 соответственно, но их можно поменять, сняв перемычку и соединив вывод Motor Shield с нужным выводом Arduino Uno.
Алгоритм работы:
- Если центральный датчик находится на линии, а боковые вне линии, то машинка едет прямо.
- Если левый датчик находится на линии, а правый вне линии, то машинка поворачивает налево (независимо от показаний центрального датчика)
- Если правый датчик находится на линии, а левый вне линии, то машинка поворачивает направо (независимо от показаний центрального датчика)
- Если правый и левый датчики находятся на линии (вне зависимости от показаний центрального датчика), то такое состояние является неопределённым, машинка продолжает предыдущее движение (прямо или с поворотом) в течении 2 секунд (можно менять в скетче). Если в течении этого времени состояние не изменится, то она остановится.
- Если все три датчика находятся вне линии, то такое состояние является неопределённым (потеря линии). Если этому состоянию предшествовал поворот, то машинка продолжит поворот в течении 2 секунд (можно менять в скетче). Если в течении этого времени состояние не изменится, то она остановится. Если этому состоянию не предшествовал поворот (машинка ехала прямо и линия оборвалась), то машинка сразу остановится.
- Если перед машинкой появилось препятствие, на расстоянии менее 10 см (можно менять в скетче), то машинка остановится и продолжит движение, как только препятствие исчезнет.
Скорость движения задаётся в константе valSpeed, от 1 до 255. Крутизна поворотов задаётся в константе valTurning, от 1 до 255. Время продолжения движения, при неопределённом состоянии, задаётся в константе tmrDelay, в микросекундах. Направление движения моторов указывается логическими значениями элементов массива arrRoute (0 элемент — правый мотор, 1 элемент — левый мотор), по умолчанию все элементы равны «1». Если вы перепутали полярность при подключении мотора, то измените значение соответствующего элемента этого массива на «0».
Калибровка для светлых, слабоконтрастных или цветных линий:
Машинка настроена на движение по темной линии, но она может ездить по светлым, слабоконтрастным или цветным линиям. Для этого её нужно откалибровать, указав значения для констант valSensor1 (показание датчика находящегося на линии) и valSensor0 (показание датчика находящегося вне линии). Для чего, в коде setup скетча, предусмотрен вывод показаний центрального датчика в монитор последовательного порта.
- Поместите машинку так, чтобы центральный датчик находился над линией.
- Подключите Arduino Uno по USB кабелю.
- Откройте монитор последовательного порта. В мониторе высветится показание датчика на линии.
- Поместите машинку так, чтобы центральный датчик находился вне линии.
- Нажмите кнопку reset на Motor Shield. В мониторе высветится показание датчика вне линии.
- Укажите первое значение константе valSensor1, а второе значение константе valSensor0 и повторно загрузите скетч.
Введение:
В этом уроке мы создадим машинку, которая будет ездить по траектории нарисованной линии, а также останавливаться при обнаружении препятствий.
При создании любого робота, его нужно оснастить датчиками (показания которых будет считывать робот), управляющими модулями (для вывода результатов работы робота), и скетчем (по алгоритму которого должен работать робот). В нашем случае, мы оснастим машинку, тремя аналоговыми датчиками линий и одним ультразвуковым датчиком расстояния, а в роли управляющих модулей выступят два закрепленных к каркасе моторчика, с колёсами на валах.
Видео:
Нам понадобится:
- Arduino Uno х 1шт.
- Motor Shield (на 2 канала) x 1шт.
- Аналоговый датчик линии x 3шт.
- Машинка (базовый комплект)
Для реализации проекта нам необходимо установить библиотеку:
- iarduino_HC_SR04_int для работы с ультразвуковыми датчиками расстояния по внешним прерываниям.
О том как устанавливать библиотеки, Вы можете ознакомиться на странице Wiki — Установка библиотек в Arduino IDE .
Схема подключения:
Моторчики подключаются к клеммам M1 (левый мотор) и M2 (правый мотор) расположенным на Motor Sield. Аналоговые датчики линии подключаются к любым аналоговым входам Arduino Uno, в нашем примере используются входы A5 (для правого датчика), A4 (для центрального датчика) и A3 (для левого датчика). Вывод TRIG ультразвукового датчика расстояния подключается к любому выводу Arduino Uno, в нашем случае вывод D2. Вывод ECHO, при использовании библиотеки iarduino_HC_SR04_int, может подключаться только к тем выводам Arduino Uno, которые используют внешние прерывания, в нашем случае это вывод D3. Все датчики запитаны от напряжения 5 В. Напряжение питания на Arduino Unoподаётся через Motor Shield (клеммник Vin), для чего нужно установить перемычку, рядом с клеммником, в позицию «Общ. Пит.». Входы Motor Shield H1 (направление 1 мотора), E1 (ШИМ 1 мотора), E2 (ШИМ 2 мотора), H2 (направление 2 мотора), по умолчанию, подключены к выводам D7, D6, D5 и D4 соответственно, но их можно поменять, сняв перемычку и соединив вывод Motor Shield с нужным выводом Arduino Uno.
Алгоритм работы:
- Если центральный датчик находится на линии, а боковые вне линии, то машинка едет прямо.
- Если левый датчик находится на линии, а правый вне линии, то машинка поворачивает налево (независимо от показаний центрального датчика)
- Если правый датчик находится на линии, а левый вне линии, то машинка поворачивает направо (независимо от показаний центрального датчика)
- Если правый и левый датчики находятся на линии (вне зависимости от показаний центрального датчика), то такое состояние является неопределённым, машинка продолжает предыдущее движение (прямо или с поворотом) в течении 2 секунд (можно менять в скетче). Если в течении этого времени состояние не изменится, то она остановится.
- Если все три датчика находятся вне линии, то такое состояние является неопределённым (потеря линии). Если этому состоянию предшествовал поворот, то машинка продолжит поворот в течении 2 секунд (можно менять в скетче). Если в течении этого времени состояние не изменится, то она остановится. Если этому состоянию не предшествовал поворот (машинка ехала прямо и линия оборвалась), то машинка сразу остановится.
- Если перед машинкой появилось препятствие, на расстоянии менее 10 см (можно менять в скетче), то машинка остановится и продолжит движение, как только препятствие исчезнет.
Скорость движения задаётся в константе valSpeed, от 1 до 255. Крутизна поворотов задаётся в константе valTurning, от 1 до 255. Время продолжения движения, при неопределённом состоянии, задаётся в константе tmrDelay, в микросекундах. Направление движения моторов указывается логическими значениями элементов массива arrRoute (0 элемент — правый мотор, 1 элемент — левый мотор), по умолчанию все элементы равны «1». Если вы перепутали полярность при подключении мотора, то измените значение соответствующего элемента этого массива на «0».
Калибровка для светлых, слабоконтрастных или цветных линий:
Машинка настроена на движение по темной линии, но она может ездить по светлым, слабоконтрастным или цветным линиям. Для этого её нужно откалибровать, указав значения для констант valSensor1 (показание датчика находящегося на линии) и valSensor0 (показание датчика находящегося вне линии). Для чего, в коде setup скетча, предусмотрен вывод показаний центрального датчика в монитор последовательного порта.
- Поместите машинку так, чтобы центральный датчик находился над линией.
- Подключите Arduino Uno по USB кабелю.
- Откройте монитор последовательного порта. В мониторе высветится показание датчика на линии.
- Поместите машинку так, чтобы центральный датчик находился вне линии.
- Нажмите кнопку reset на Motor Shield. В мониторе высветится показание датчика вне линии.
- Укажите первое значение константе valSensor1, а второе значение константе valSensor0 и повторно загрузите скетч.
В данной статье будет описан процесс создания робота, ездящего по линии. Эта задача является классической, идейно простая, она может решаться много раз, и каждый раз вы будете открывать для себя что-то новое. Решение этой задачи и реализация полученного решения позволяют приобрести необходимые начальные навыки для дальнейшего совершенствования в робототехнике.
Существует множество подходов для решения задачи следования по линии. Выбор одного из них зависит от конкретной конструкции робота, от количества сенсоров, их расположения относительно колёс и друг друга.
В нашем примере будет собран робот на лёгкой платформе с двумя колёсами и двумя датчиками линии, расположенными на днище робота перед колёсами.
В результате выглядеть он будет так:
Что понадобится
Для нашего примера понадобятся следующие детали:
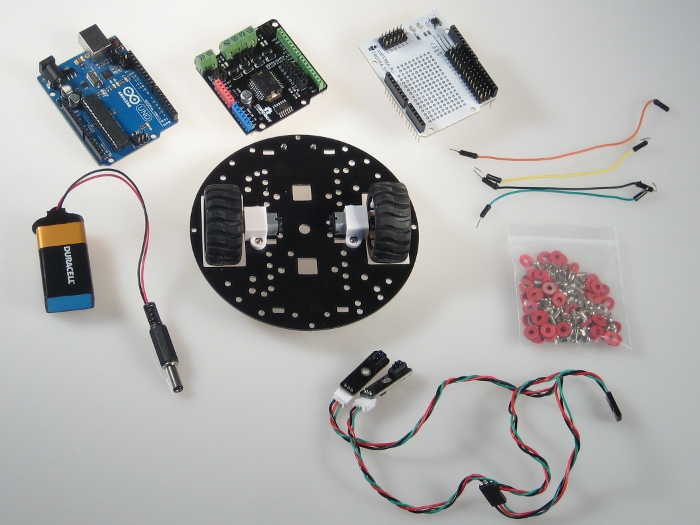
Вообще говоря, лучше было бы использовать NiMH-аккумуляторы: они лучше отдают ток и значительно дольше держат напряжение, но для целей этого проекта одной батарейки на 9 В вполне хватило.
Собираем робота
Сначала соберём робота, установим всю механику и электронику.
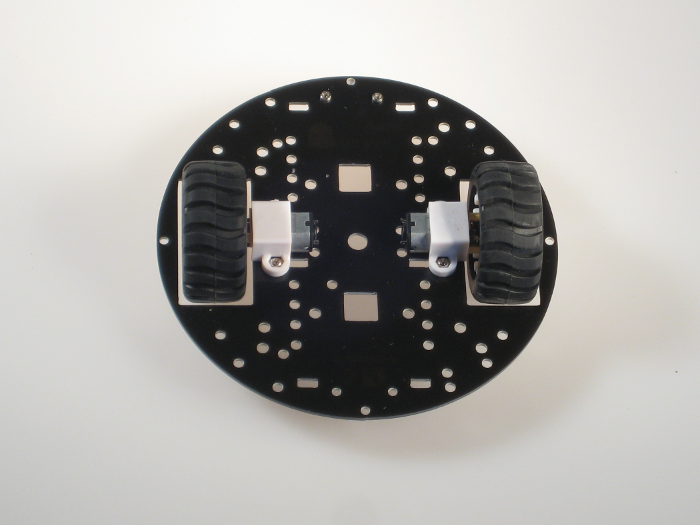
Собираем платформу
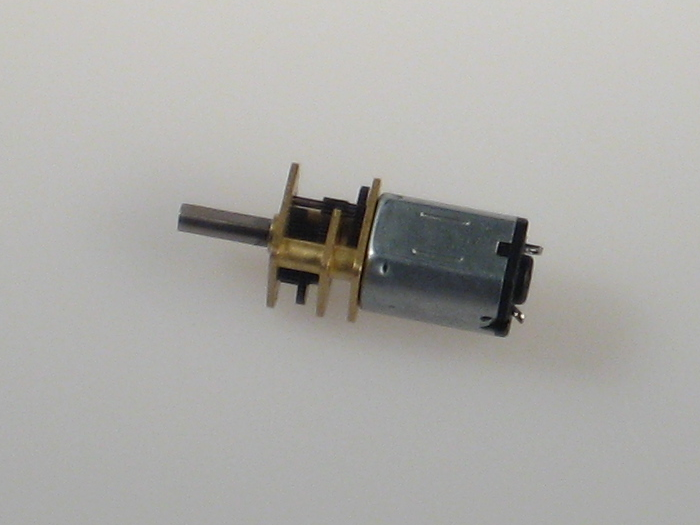
Для начала прикрепим колёса к моторам.

Затем с помощью пластиковых П-образных креплений прикручиваем моторчики к платформе. Обратите внимание на взаимное расположение крепления и моторчики: в креплении есть небольшие углубления, так что если всё соединить правильно, то моторчики будут крепко держаться и никуда не выскочат.
Теперь крепим балансировочный шар.
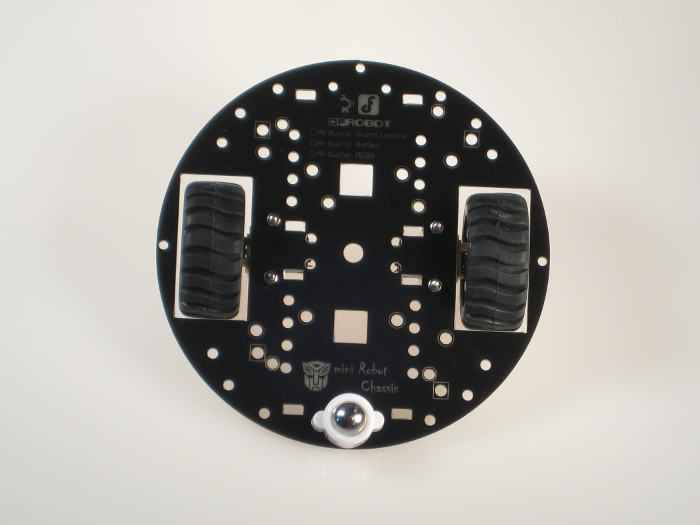
Отлично! Платформа собрана. Если вам кажется, что колёсам отведено слишком мало места и они трутся о платформу, то скорее всего вам нужно посильнее надавить на колёса, чтобы они плотнее сели на вал мотора.
Крепим сенсоры
Закрепим их, как показано на фото:
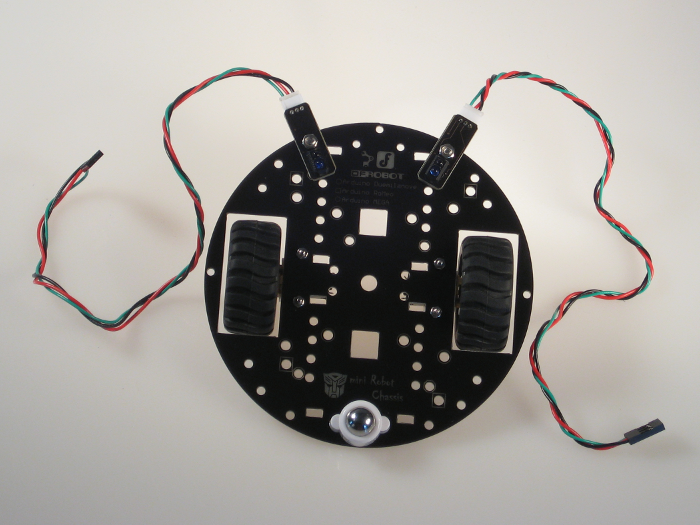
Можно было бы выбрать и другое место. Это могло бы сделать контроль проще или сложнее, а самого робота более или менее эффективным. Оптимальное расположение — вопрос серии экспериментов. Для этого проекта просто был выбран такой способ крепления.
Крепим Arduino
Arduino закрепим с противоположной стороны двумя винтиками и гайками.
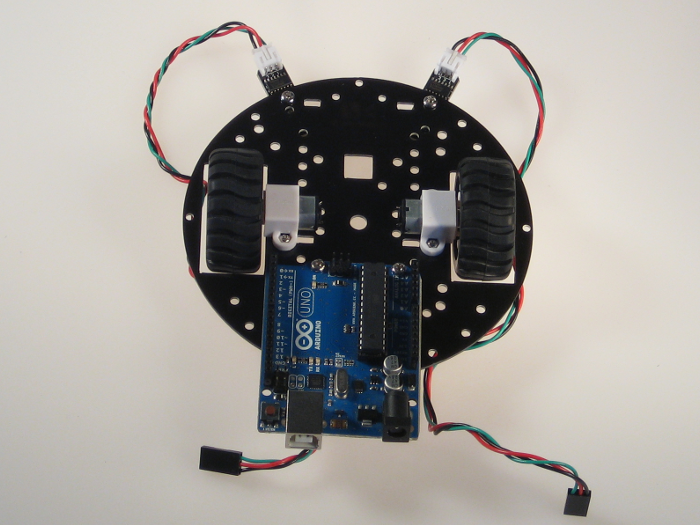
Опять же, можно выбрать и другое место. Например над колёсами, если приподнять Arduino на латунных стойках. Это изменило бы положение центра масс и повлияло бы на эффективность робота в лучшую или худшую сторону.
Крепим Motor Shield и соединительные провода
Установим Motor Shield на Arduino и подсоединим соединительные провода. Обратите внимание, чтобы соотвествовать программному коду из примера ниже, моторчики соединены с Motor Shield так: правый — к клеммам M1 с прямой полярностью (плюс к плюсу), а левый — к M2 с обратной (плюс к минусу).
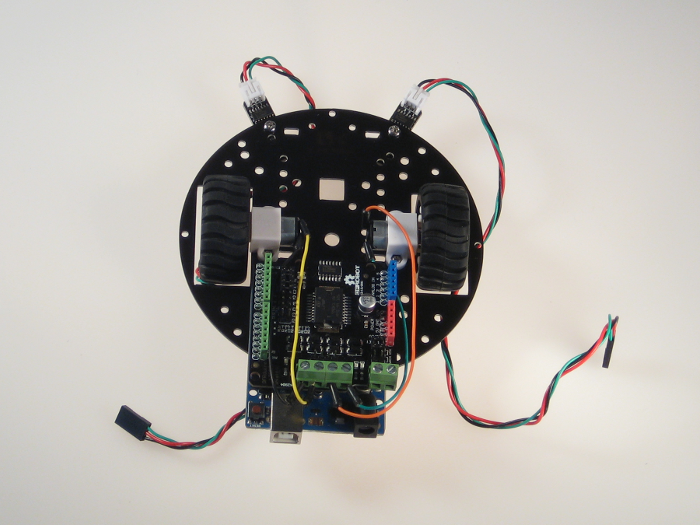
В этом проекте, для экономии времени концы соединительных проводов просто скручены с контактами моторов. При работе «начисто» стоит жёстко припаять провода к моторам.
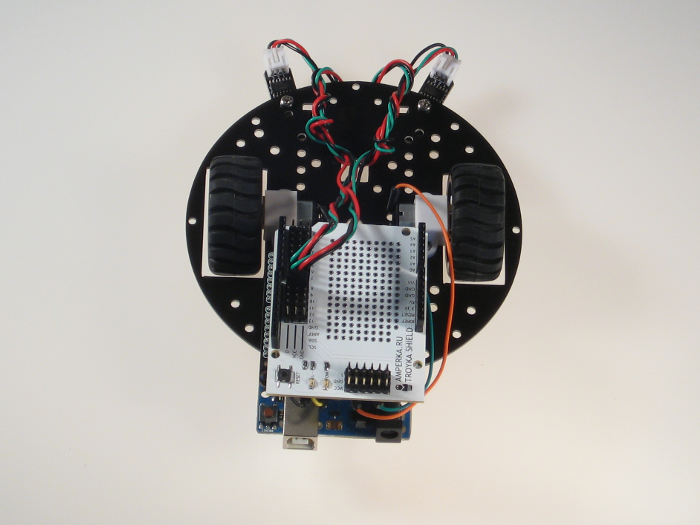
Крепим Troyka Shield
Присоединяем сверху Troyka Shield и подключаем датчики к 8 и 9 цифровым контактам. В итоге получаем следующую конструкцию:
Программирование
Теперь напишем программу, которая заставит собранную конструкцию двигаться по нарисованной линии. В проекте мы будем использовать чёрную линию, напечатанную на белых листах бумаги.
Основная идея алгоритма
Пусть у нас усть белое поле, и на нём чёрным нарисован трек для нашего робота. Используемые датчики линии выдают логический ноль, когда «видят» чёрное и единицу, когда «видят» белое.
На прямой робот должен пропускать трек между сенсоров, то есть оба сенсора должны показывать единички.
При повороте траектории направо, правый сенсор наезжает на трек и начинает показывать логический ноль. При повороте налево, ноль показывает левый сенсор.
Таким образом получаем простую систему с тремя состояниями:
На вход системы поступает информация с сенсоров. Получаем следующую логику переходов:
| Левый | Правый | Целевое состояние |
|---|---|---|
| STATE_FORWARD | ||
| 1 | STATE_RIGHT | |
| 1 | STATE_LEFT | |
| 1 | 1 | STATE_FORWARD |
Реализация на Arduino
Проблема инертности и её решение
Однако если выставить скорость моторов побольше, мы столкнёмся со следующей проблемой: наш робот будет вылетать с трека, не успевая отреагировать на поворот. Это связано с тем, что наши моторчики не умеют тормозить мгновенно.
В этом легко убедиться поставив следующий эксперимент: с заданной скоростью робот будет двигаться по поверхности, и в некоторый момент будет установлена нулевая скорость и измерен тормозной путь робота. Пусть робот разгоняется по монотонной поверхности и тормозится при фиксировании импровизированной стоп-линии.
Эксперимент проведём для разных скоростей. Код программы для эксперимента таков:
На той поверхности, на которой проводился эксперимент, были получены следующие результаты:
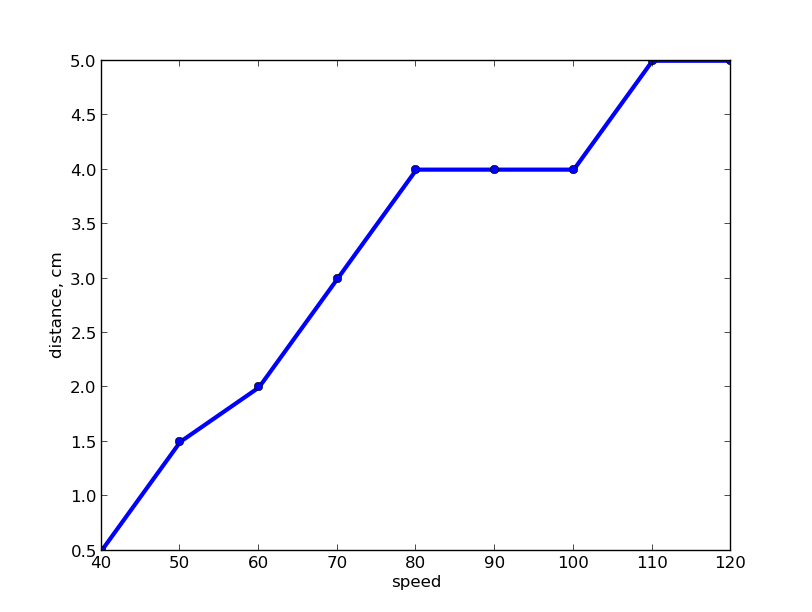
Таким образом, начиная с некоторого момента у нашего робота нет никакой возможности успеть среагировать и остаться на треке.
Что можно сделать?! После того, как сенсоры улавливают поворот, можно остановиться и вернуться назад на некоторое расстояние, зависящее от скорости перед остановкой. Однако мы можем отдать команду роботу ехать с какой-то скоростью, но не можем приказать ему проехать какое-то расстояние.
Для того, чтобы понять зависимость расстояния при заднем ходе от времени, был проведён ещё один замер:
На скорости 50, например, робот проделывал путь, зависящий от времени следующим образом:
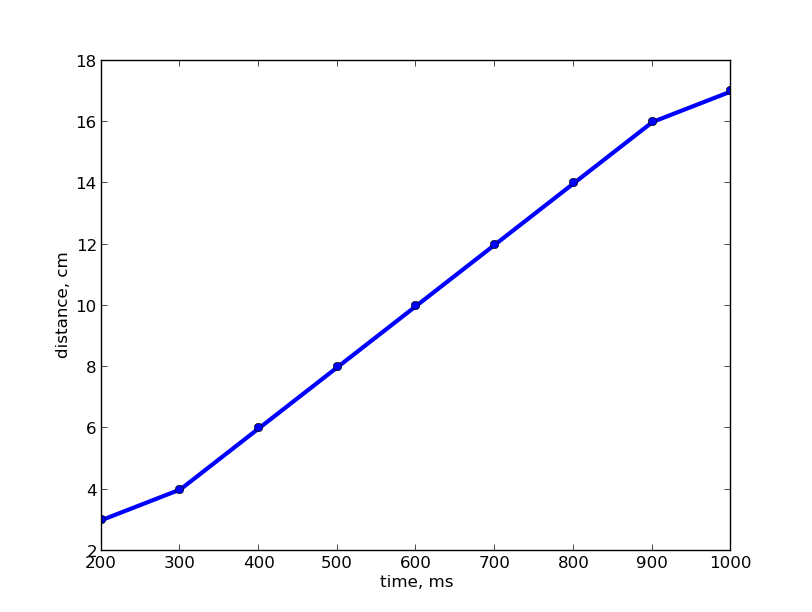
Полученные две зависимости были линейно аппроксимированы, затем была выведена формула зависимости времени, которое надо двигаться назад, от скорости перед остановкой.
Обратим внимание на то, что у вас значения могут оказаться другими: из-за особенностей сборки либо из-за поверхности, поэтому в общем случае лучше провести все измерения самостоятельно.
Адаптивное поведение
Перед финальным экспериментом произведём ещё несколько поправок.
Во-первых, нам необязательно давать команду ехать назад перед каждым поворотом, как мы помним, на маленькой скорости робот прекрасно справляется и без этого. К тому же лучше ему двигаться не прямо назад, а немного поворачивая, всё-таки робот находится перед поворотом.
Во-вторых, нам стоит различать состояния робота: когда он движется по прямой, и ничто ему не мешает ускоряться; и когда робот входит в поворот. В первом случае действительно будем увеличивать скорость робота для более динамичного прохождения трека, во втором случае будем сбрасывать скорость до значения, достаточного для успешного прохождения поворота, и будем держать эту скорость ещё какое-то время.
В итоге наш код будет выглядит следующим образом:
Результат
Что дальше?
Представленный алгоритм оставляет множество возможностей для улучшения и оптимизации. Скорость поворота можно так же менять адаптивно. Можно добавить контроль заноса. Можно поиграть с расположением сенсоров и центром масс. В конце концов можно получить непобедимого на треке робота.
Нет ничего лучше, чем обставить оппонента на секунду-другую.